
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
AGLoc++: WiFi-Fused Global Localization and Monte Carlo Enhanced Tracking in Hierarchical Area Graph
Project Description:
Extending previous work of Robust Lifelong Indoor LiDAR Localization using the Area Graph, published on RAL 2023.
Extending previous work of Robust Lifelong Indoor LiDAR Localization using the Area Graph, published on RAL 2023.
Campus Autonomy: Navigating the Future with Autonomous Indoor-Outdoor Delivery Vehicles
Project Description:
Development of an autonomous delivery vehicle capable of navigating both indoor and outdoor environments within a campus setting.
Development of an autonomous delivery vehicle capable of navigating both indoor and outdoor environments within a campus setting.

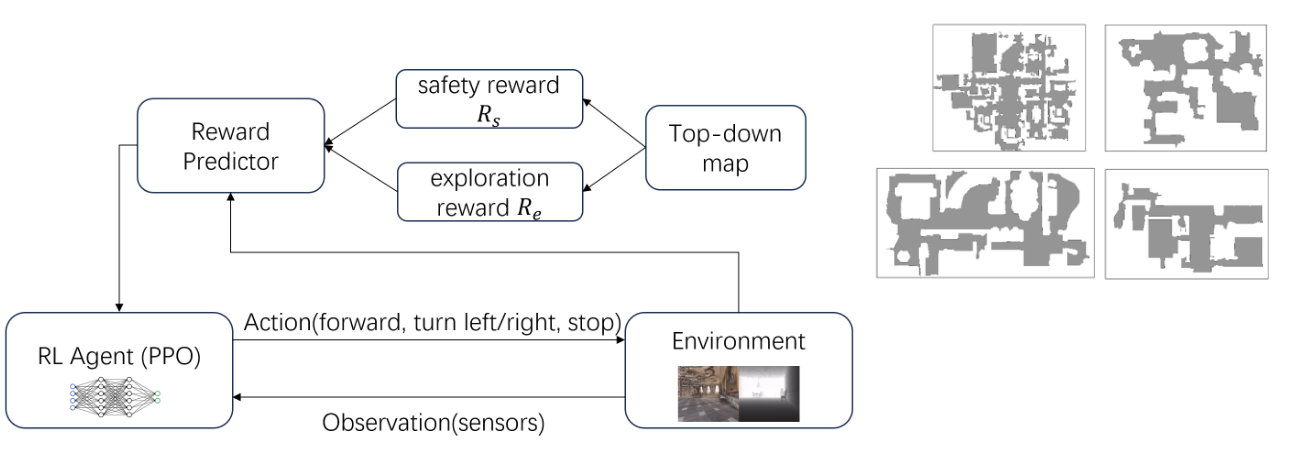
Towards Safer Navigation: Reward Shaping with Prior Topographic Knowledge
Project Description:
Enhancing navigation safety in deep reinforcement learning agents through reward shaping with prior map information.
Enhancing navigation safety in deep reinforcement learning agents through reward shaping with prior map information.
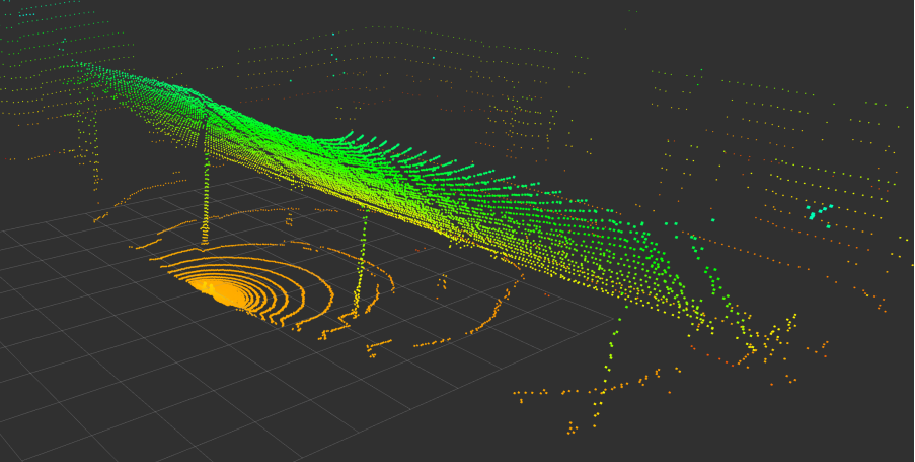
Real-time Object Detection From LiDAR Point Clouds
Project Description:
A LiDAR-based perception system for automated solar panel installation, featuring real-time detection of solar racks and support structures.
A LiDAR-based perception system for automated solar panel installation, featuring real-time detection of solar racks and support structures.
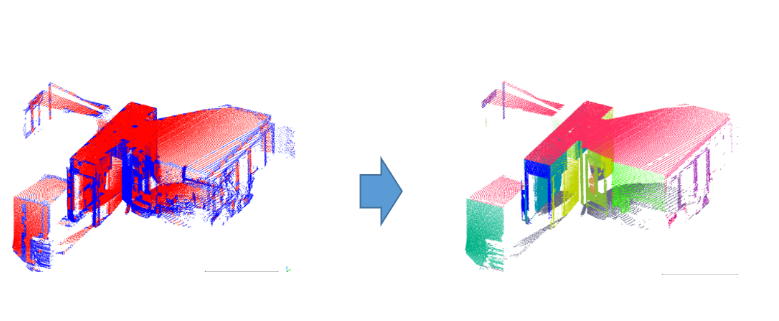
SLAM with Vertical Plane Segmentation for Lifelong Indoor Mapping
Project Description:
Development of a SLAM system with vertical plane segmentation for creating long-term indoor maps.
Development of a SLAM system with vertical plane segmentation for creating long-term indoor maps.
publications
Intelligent LiDAR Navigation: Leveraging External Information and Semantic Maps with LLM as Copilot
Published in IROS 2025, 2024
Recommended citation:
@misc{xie2024intelligentlidarnavigationleveraging, title={Intelligent LiDAR Navigation: Leveraging External Information and Semantic Maps with LLM as Copilot}, author={Fujing Xie and Jiajie Zhang and Sören Schwertfeger}, year={2024}, eprint={2409.08493}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2409.08493}, }
@misc{xie2024intelligentlidarnavigationleveraging, title={Intelligent LiDAR Navigation: Leveraging External Information and Semantic Maps with LLM as Copilot}, author={Fujing Xie and Jiajie Zhang and Sören Schwertfeger}, year={2024}, eprint={2409.08493}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2409.08493}, }
Neural Surfel Reconstruction: Addressing Loop Closure Challenges in Large-Scale 3D Neural Scene Mapping
Published in Sensors (Basel, Switzerland), 2024
Recommended citation:
Cui J, Zhang J, Kneip L, Schwertfeger S. Neural Surfel Reconstruction: Addressing Loop Closure Challenges in Large-Scale 3D Neural Scene Mapping. Sensors (Basel). 2024 Oct 28;24(21):6919. doi: 10.3390/s24216919. PMID: 39517816; PMCID: PMC11548607.
Cui J, Zhang J, Kneip L, Schwertfeger S. Neural Surfel Reconstruction: Addressing Loop Closure Challenges in Large-Scale 3D Neural Scene Mapping. Sensors (Basel). 2024 Oct 28;24(21):6919. doi: 10.3390/s24216919. PMID: 39517816; PMCID: PMC11548607.
Generation of Indoor Open Street Maps for Robot Navigation from CAD Files
Published in arXiv, 2025
Recommended citation:
Zhang, J., Wu, S., Ma, X., & Schwertfeger, S. (2025). Generation of Indoor Open Street Maps for Robot Navigation from CAD Files. arXiv preprint arXiv:2507.00552.
Zhang, J., Wu, S., Ma, X., & Schwertfeger, S. (2025). Generation of Indoor Open Street Maps for Robot Navigation from CAD Files. arXiv preprint arXiv:2507.00552.
teaching
Mobile Manipulation 2024 Fall - Teaching Assistant
Course Information:
Graduate course, ShanghaiTech University, SIST, 2024
Shanghai, China
Graduate course, ShanghaiTech University, SIST, 2024
Shanghai, China
