Jiajie Zhang 「张嘉杰」
Research Assistant at PEAK Lab, HKUST-GZ

About Me
I am currently a Research Assistant at PEAK Lab, HKUST-GZ, working with Professor Changhao Chen. I received my Master’s degree in Computer Science and Technology from ShanghaiTech University (2023 - 2026), advised by Professor Sören Schwertfeger at the MARS Lab (Mobile Autonomous Robotics Systems Laboratory). I received my B.S. in Automation from Zhengzhou University (2019 - 2023).
Research Interests
- Action-centric latent representations from passive video and robot interaction data
- Generalizable world models for contact-rich, long-horizon robot manipulation
- World-model-guided policy learning, adaptation, and replanning for embodied intelligence
For more details, please visit my publications, projects, or CV.
news
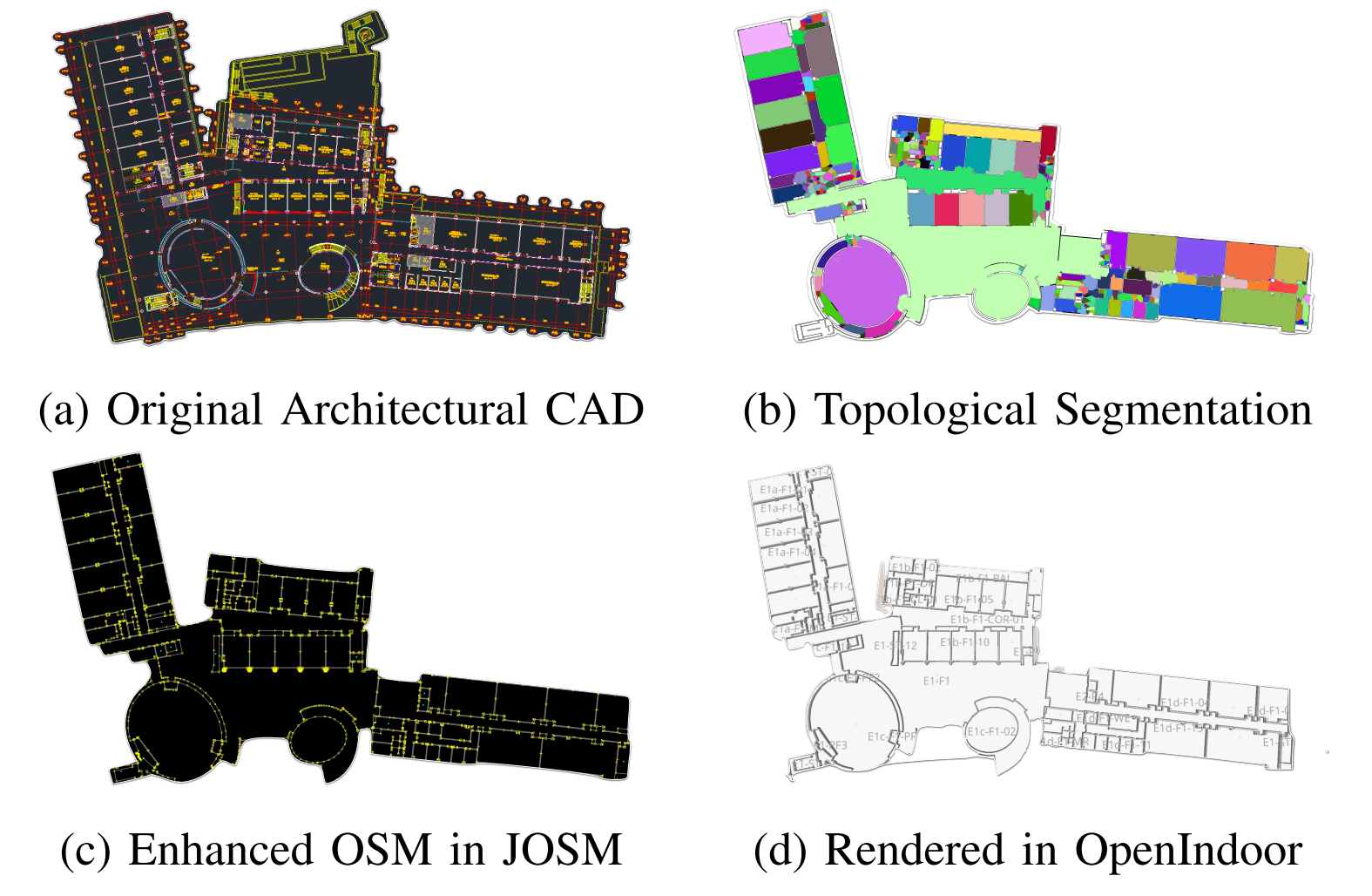
| Jun 17, 2026 | Our paper Generation of Indoor Open Street Maps for Robot Navigation from CAD Files has been accepted by IROS 2026! 🎉 |
|---|---|
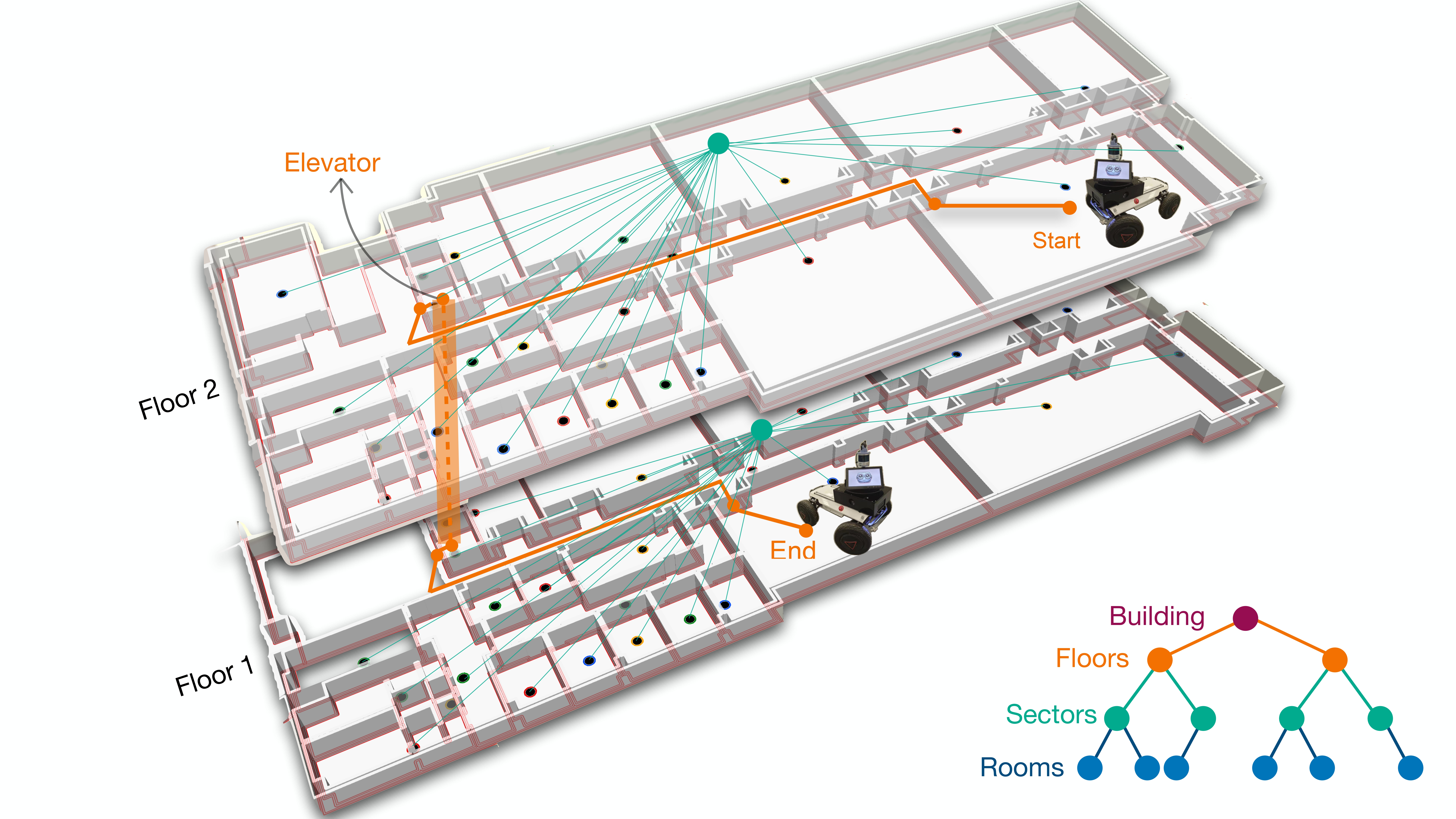
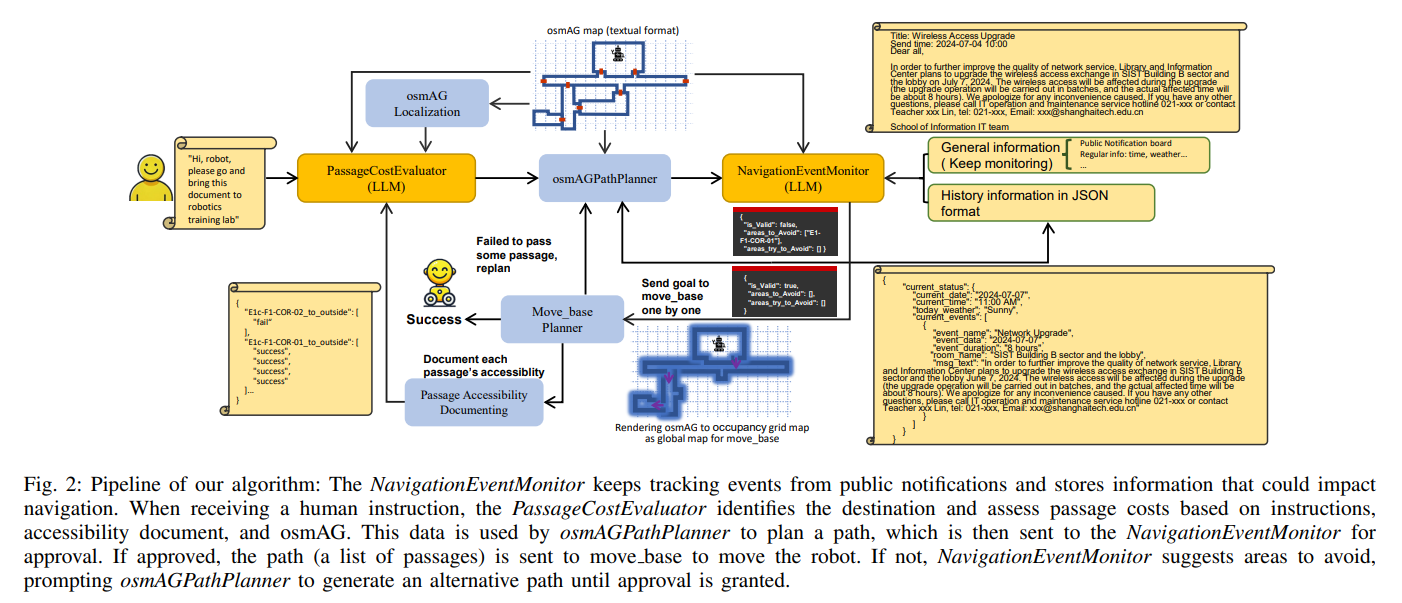
| Apr 01, 2026 | Our paper osmAG-Nav: A Hierarchical Semantic Topometric Navigation Stack for Robust Lifelong Indoor Autonomy is now available on arXiv! |
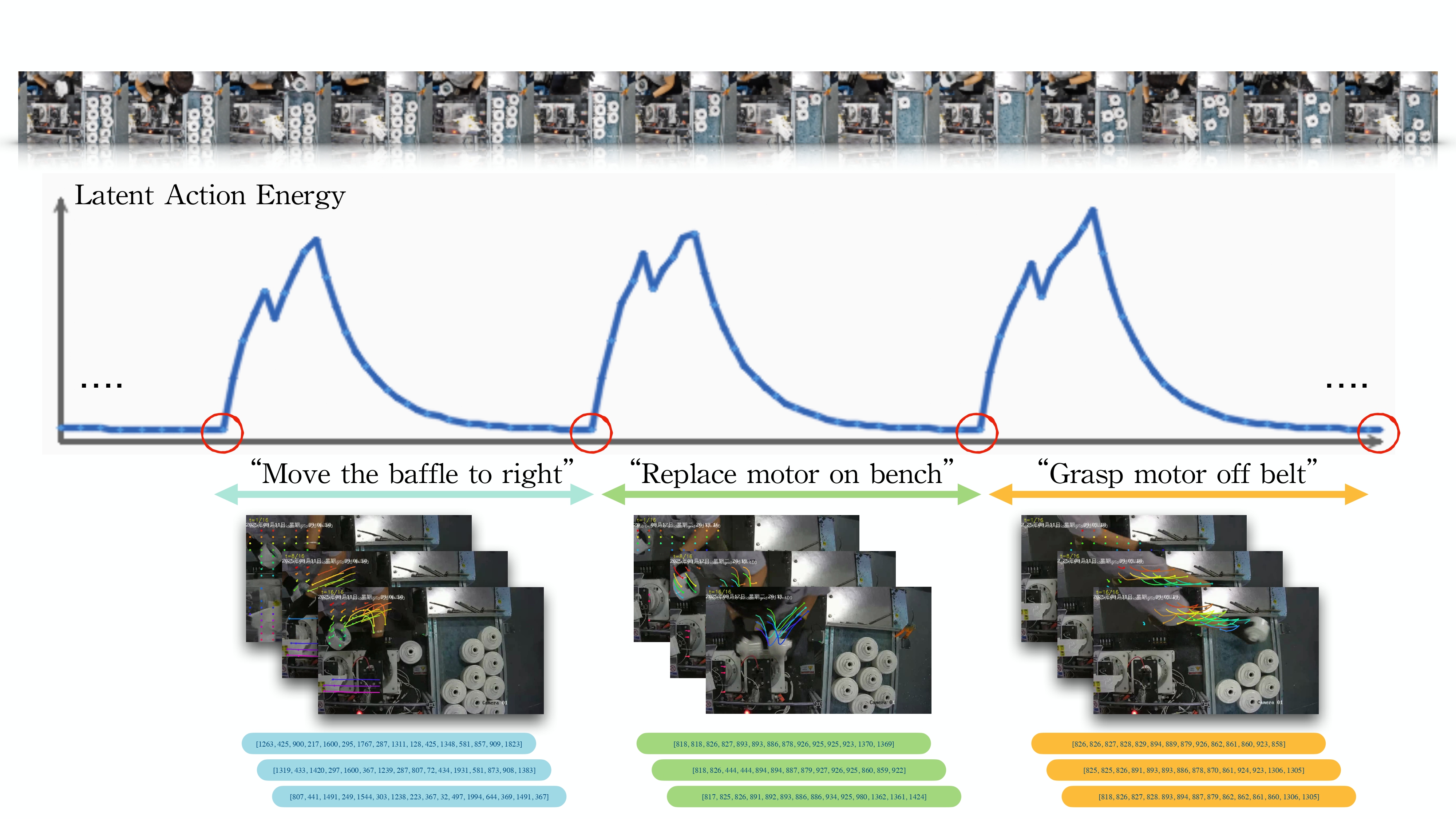
| Feb 23, 2026 | Our paper From Observation to Action: Latent Action-based Primitive Segmentation for VLA Pre-training in Industrial Settings has been accepted to CVPR 2026! 🎉 |
| Jul 07, 2025 | Research Assistant at AI R&D Center, Central Research Institute, Wolong Electric (July–October). Supervised by Dr. Alexander Kleiner. |
| Jul 01, 2025 | New preprint on Generation of Indoor Open Street Maps for Robot Navigation from CAD Files is now available on arXiv! |