
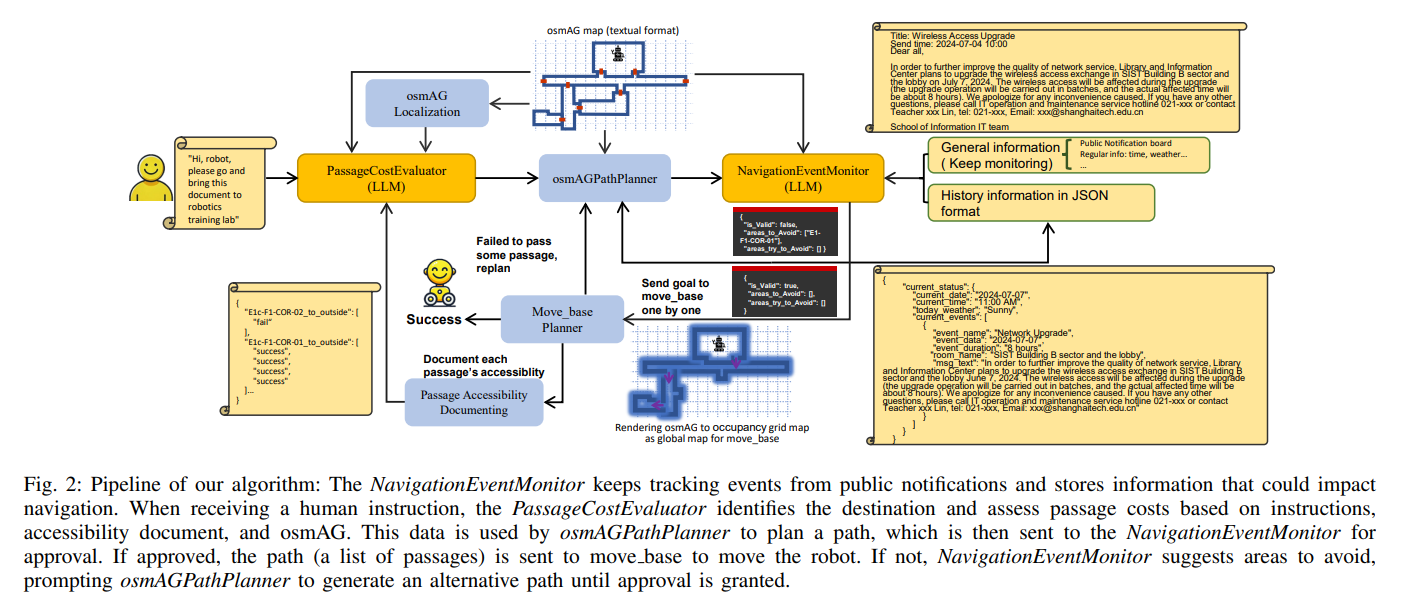
Intelligent LiDAR Navigation: Leveraging External Information and Semantic Maps with LLM as Copilot
Published in IROS 2025, 2024
You can view this paper online here
Recommended citation: @misc{xie2024intelligentlidarnavigationleveraging, title={Intelligent LiDAR Navigation: Leveraging External Information and Semantic Maps with LLM as Copilot}, author={Fujing Xie and Jiajie Zhang and Sören Schwertfeger}, year={2024}, eprint={2409.08493}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2409.08493}, }
Download Paper